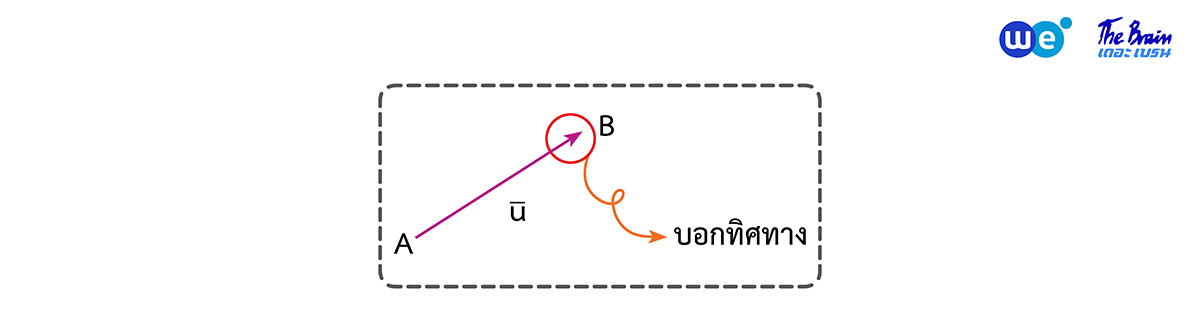
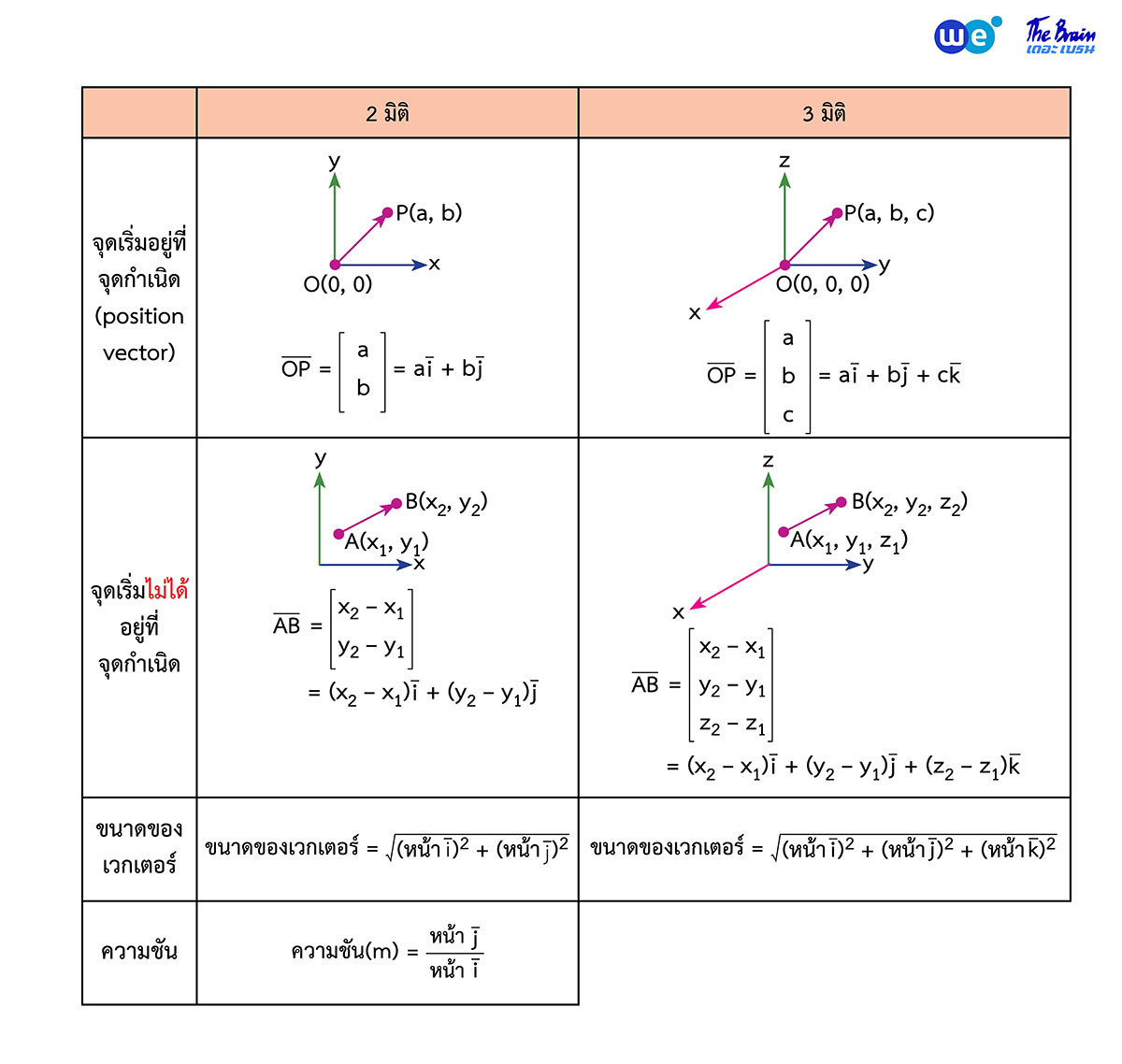
จากรูปจะแสดงเวกเตอร์จาก  ไป
ไป  อ่านว่า เวกเตอร์ เอบี เขียนแทนด้วย
อ่านว่า เวกเตอร์ เอบี เขียนแทนด้วย  หรืออาจใช้สัญลักษณ์อื่นแทน เช่น
หรืออาจใช้สัญลักษณ์อื่นแทน เช่น 
- โดยเรียก
 ว่า จุดเริ่มต้น (initial point) ของเวกเตอร์
ว่า จุดเริ่มต้น (initial point) ของเวกเตอร์ - และเรียก
 ว่า จุดสิ้นสุด (terminal point) ของเวกเตอร์
ว่า จุดสิ้นสุด (terminal point) ของเวกเตอร์
ขนาดเวกเตอร์ คือ ความยาวของเวกเตอร์ เขียนแทนด้วย  หรือ
หรือ 
เวกเตอร์ศูนย์ (zero vector) คือ เวกเตอร์ที่มีขนาดเป็นศูนย์ เขียนแทนด้วย  หรือ
หรือ  (จุดเริ่มต้นและจุดสิ้นสุดอยู่ที่จุดเดียวกัน)
(จุดเริ่มต้นและจุดสิ้นสุดอยู่ที่จุดเดียวกัน)
** โดยทั่วไปจะไม่กล่าวถึง ทิศทางของเวกเตอร์ศูนย์ นะครับ**
และ  ที่เป็นเวกเตอร์ขนานกัน จะแบ่งได้ 2 กรณี คือ
ที่เป็นเวกเตอร์ขนานกัน จะแบ่งได้ 2 กรณี คือ
ขนานกับ เขียนแทนด้วย 
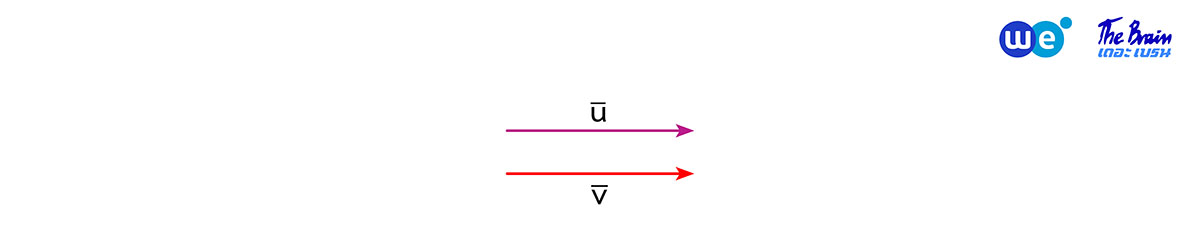
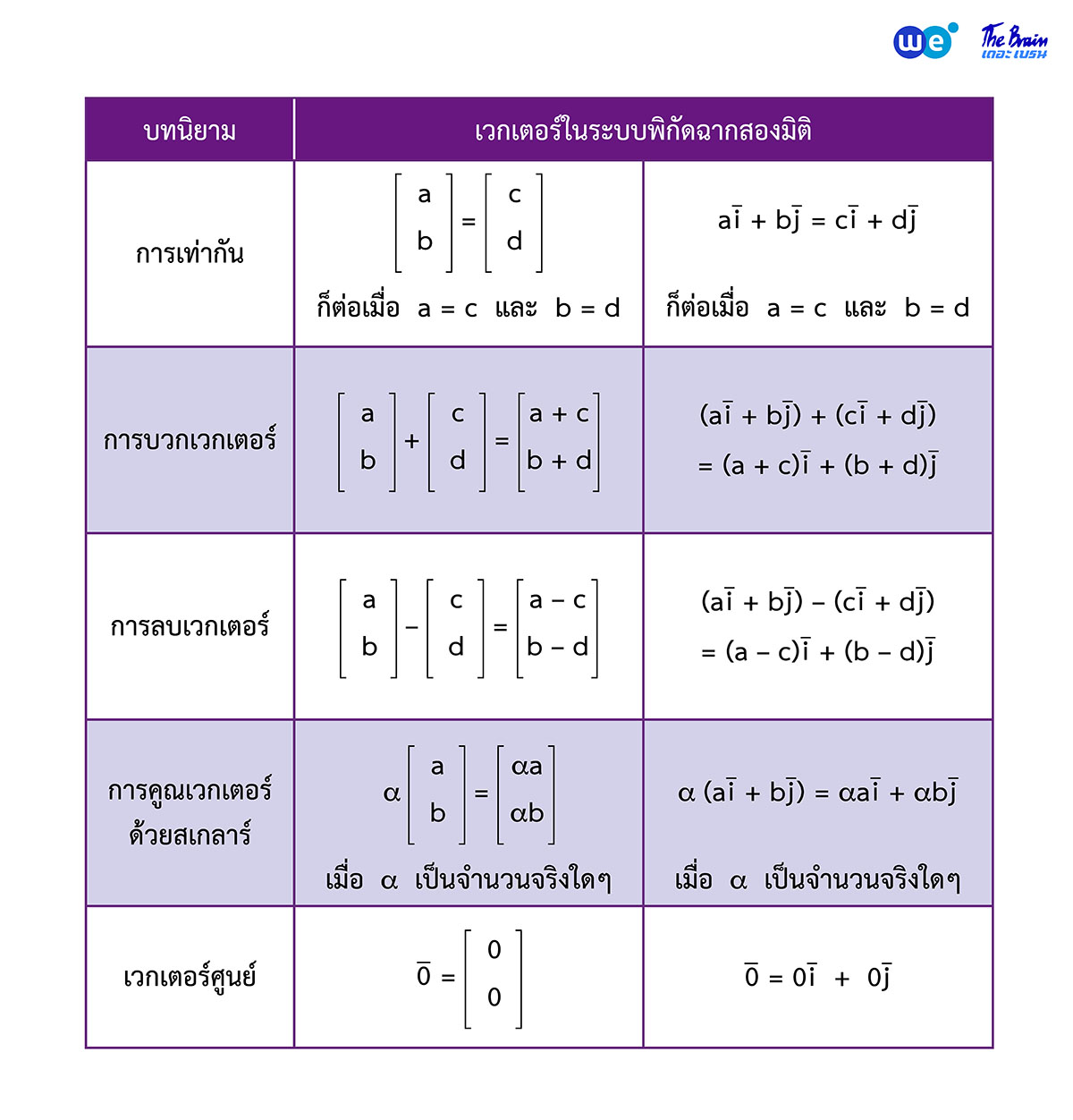
เท่ากับ ก็ต่อเมื่อ เวกเตอร์ทั้งสองมีขนาดเท่ากันและมีทิศทางเดียวกัน ดังรูป
จากรูป และ มีทิศเดียวกันและ  เขียนแทนด้วย
เขียนแทนด้วย 
❤︎ ขนาดเท่ากัน ทิศเดียวกัน
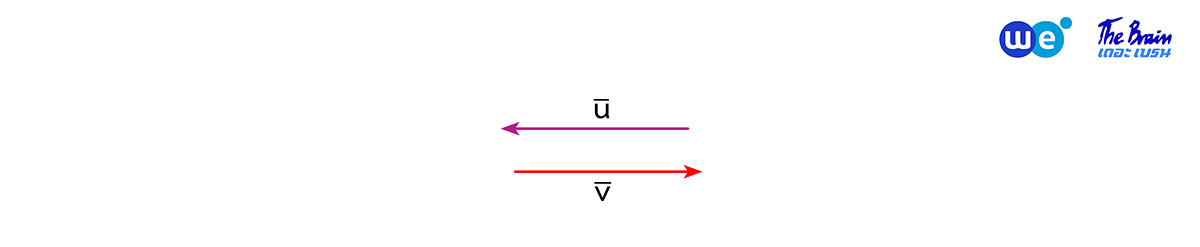
นิเสธของ คือ เวกเตอร์ที่มีขนาดเท่ากับขนาดของ แต่มีทิศทางตรงข้ามกับทิศทางของ เขียนแทนด้วย  ดังรูป
ดังรูป
จากรูป นิเสธของ คือ  นิเสธของ
นิเสธของ 
❤︎ ขนาดเท่า ทิศตรงข้าม
ให้  เป็นสเกลาร์ และ เป็นเวกเตอร์ ผลคูณของเวกเตอร์ กับสเกลาร์ เขียนแทนด้วย
เป็นสเกลาร์ และ เป็นเวกเตอร์ ผลคูณของเวกเตอร์ กับสเกลาร์ เขียนแทนด้วย  โดยที่
โดยที่
- ถ้า
 แล้ว
แล้ว 
- ถ้า
 แล้ว
แล้ว  จะมีขนาดเท่ากับ
จะมีขนาดเท่ากับ  และมีทิศเดียวกับ
และมีทิศเดียวกับ 
- ถ้า แล้ว จะมีขนาดเท่ากับ แต่มีทิศตรงข้ามกับ
 แล้ว
แล้ว 
 และมีทิศเดียวกับ
และมีทิศเดียวกับ 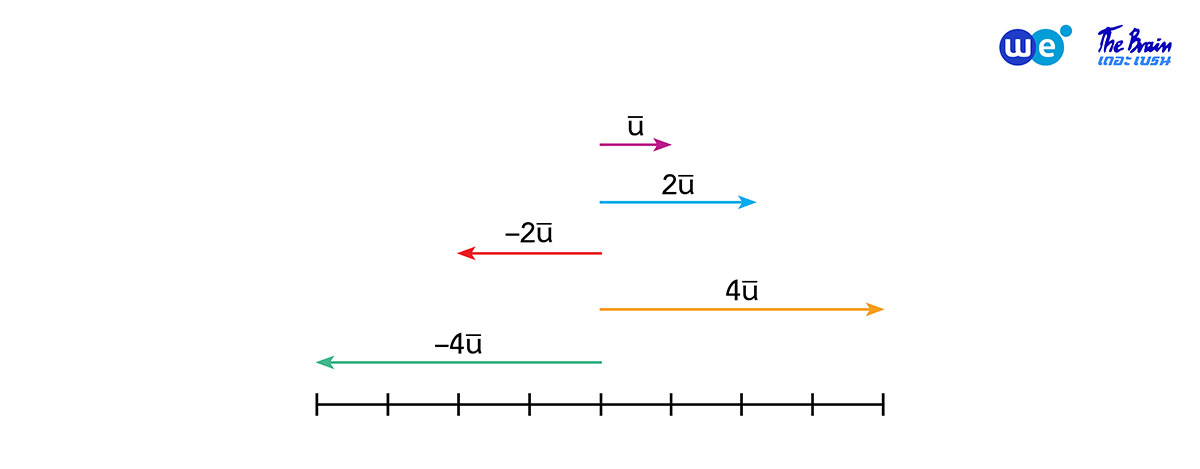
ให้ และ เป็นเวกเตอร์ใด ๆ ในระนาบ และ  เป็นจำนวนจริง (สเกลาร์)
เป็นจำนวนจริง (สเกลาร์)
- เป็นเวกเตอร์ในระนาบ (สมบัติปิด)
 (สมบัติการเปลี่ยนกลุ่ม)
(สมบัติการเปลี่ยนกลุ่ม) (สมบัติการแจกแจง)
(สมบัติการแจกแจง)
 และ
และ 



 และ
และ 
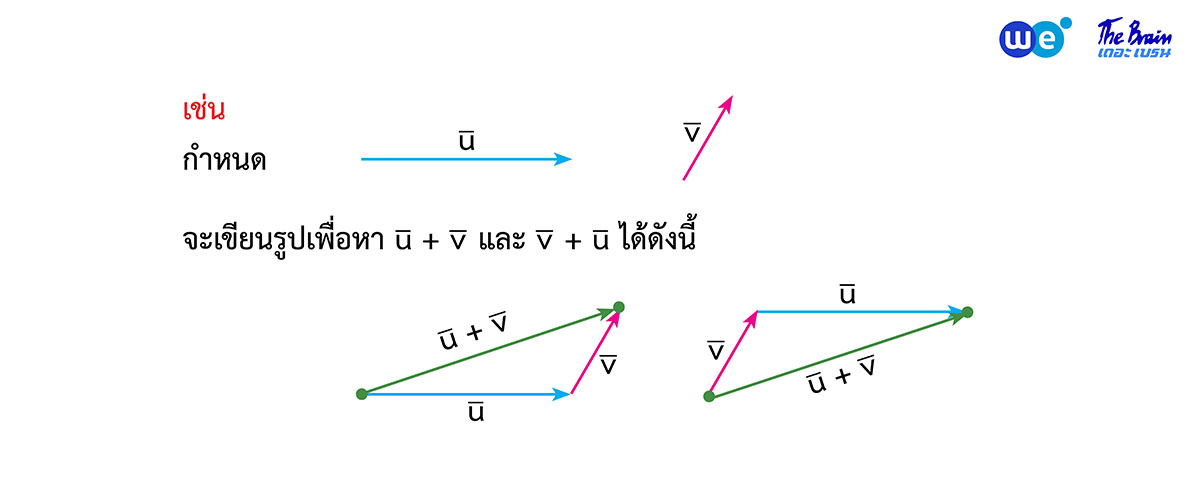
❤︎ ข้อสังเกต
จะเห็นว่า 
แสดงว่า การบวกกันของเวกเตอร์สามารถสลับที่ได้
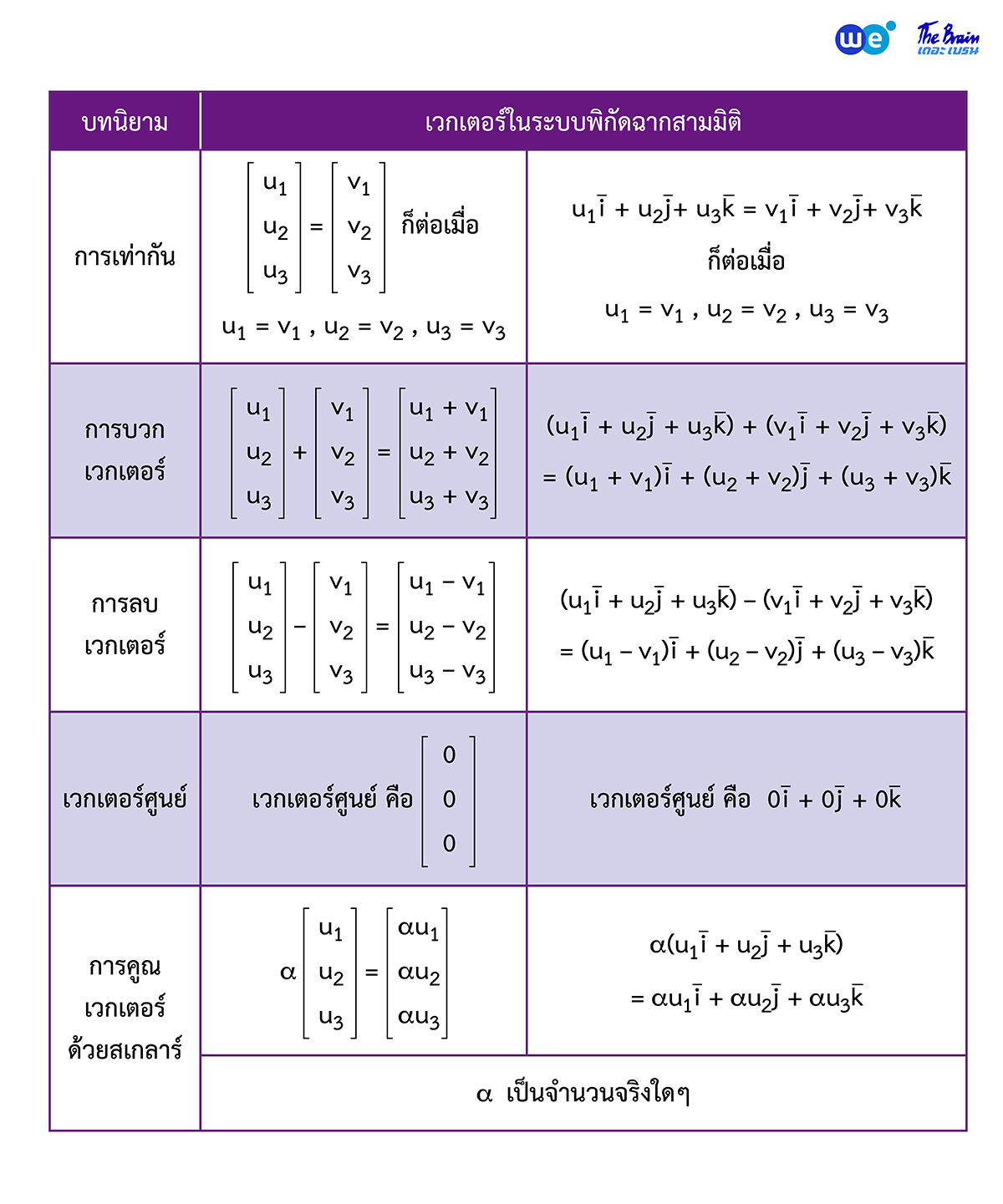
ให้  และ
และ  เป็นเวกเตอร์ใด ๆ ในระนาบ
เป็นเวกเตอร์ใด ๆ ในระนาบ
 เป็นเวกเตอร์ในระนาบ (สมบัติปิด)
เป็นเวกเตอร์ในระนาบ (สมบัติปิด) (สมบัติการสลับที่)
(สมบัติการสลับที่) (สมบัติการเปลี่ยนกลุ่มได้)
(สมบัติการเปลี่ยนกลุ่มได้) (สมบัติการมีเอกลักษณ์)
(สมบัติการมีเอกลักษณ์) (สมบัติการมีอินเวอร์ส)
(สมบัติการมีอินเวอร์ส)- ถ้า
 แล้ว
แล้ว  (สมบัติการบวกด้วยเวกเตอร์ที่เท่ากัน)
(สมบัติการบวกด้วยเวกเตอร์ที่เท่ากัน)
 เป็นเวกเตอร์ในระนาบ
เป็นเวกเตอร์ในระนาบ 


 แล้ว
แล้ว 
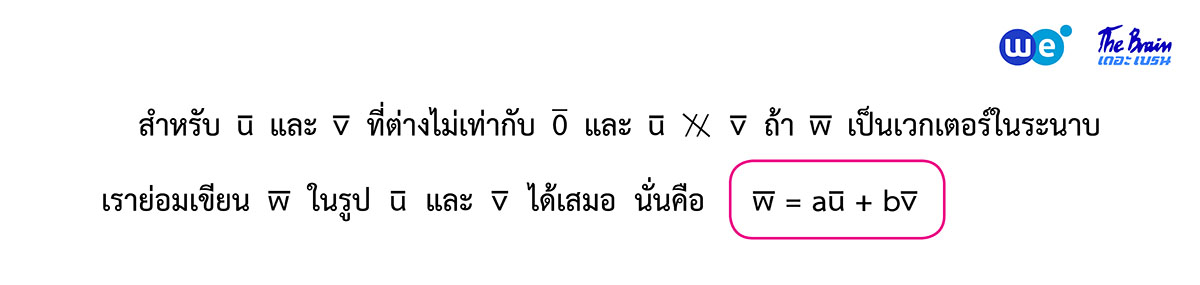
สำหรับ และ ที่ต่างไม่เท่ากับ  ก็ต่อเมื่อ
ก็ต่อเมื่อ
มีจำนวนจริง ที่ไม่เท่ากับศูนย์ ที่ทำให้ 
โดย  เมื่อ มีทิศเดียวกับ
เมื่อ มีทิศเดียวกับ
 เมื่อ มีทิศตรงข้าม
เมื่อ มีทิศตรงข้าม
เวกเตอร์หนึ่งหน่วย (unit vector) คือ เวกเตอร์ที่มีขนาด 1 หน่วย เมื่อต้องการหาเวกเตอร์ที่มีขนาด 1 หน่วย และมีทิศเดียวกันกับ
จะสามารถหาได้จาก เวกเตอร์หนึ่งหน่วยทิศเดียวกับ 
และเมื่อต้องการหาเวกเตอร์ที่ขนานกับเวกเตอร์ และมีขนาดตามที่ต้องการ
เช่น เวกเตอร์ที่มีขนาด 3 หน่วย มีทิศเดียวกันกับ
จะได้ว่า เวกเตอร์ดังกล่าว คือ 
หากต้องการเวกเตอร์ที่มีขนาด 5 หน่วย มีทิศตรงกันข้ามกับ
จะได้ว่า เวกเตอร์ดังกล่าว คือ 
แสดงว่า
เวกเตอร์ 2 หน่วยทิศเดียวกับ คือ 
เวกเตอร์ 3 หน่วยทิศเดียวกับ คือ 

เวกเตอร์ หน่วยทิศเดียวกับ คือ 
เวกเตอร์ 1 หน่วยทิศเดียวกับ คือ 
เวกเตอร์ 2 หน่วยทิศเดียวกับ คือ 
เวกเตอร์ หน่วยทิศเดียวกับ คือ 
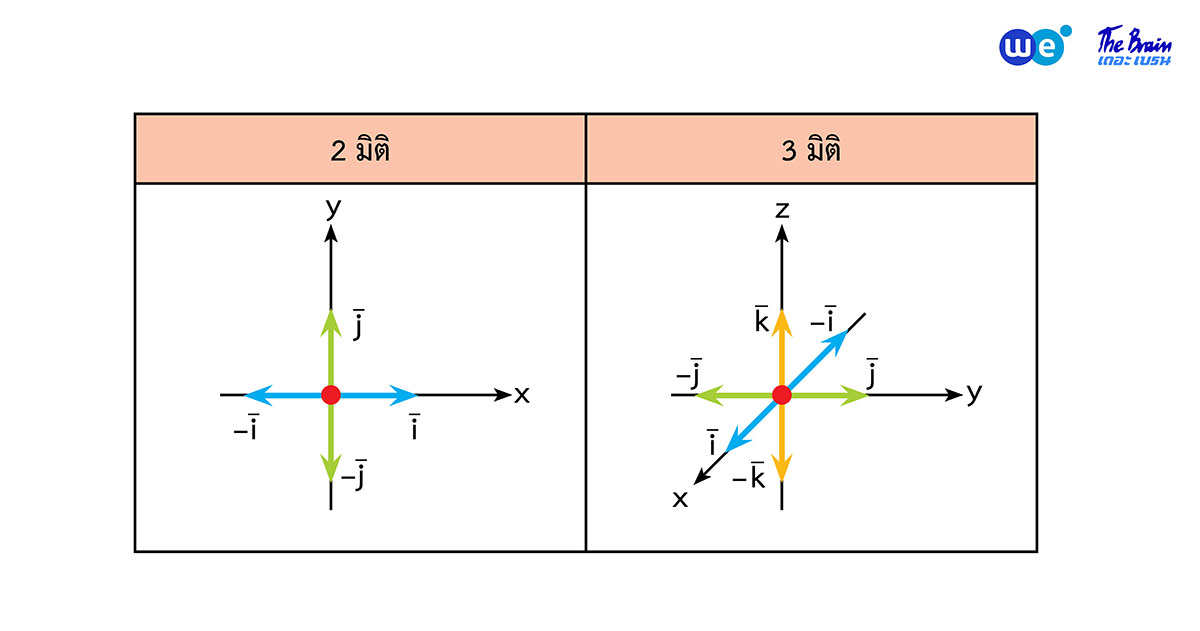
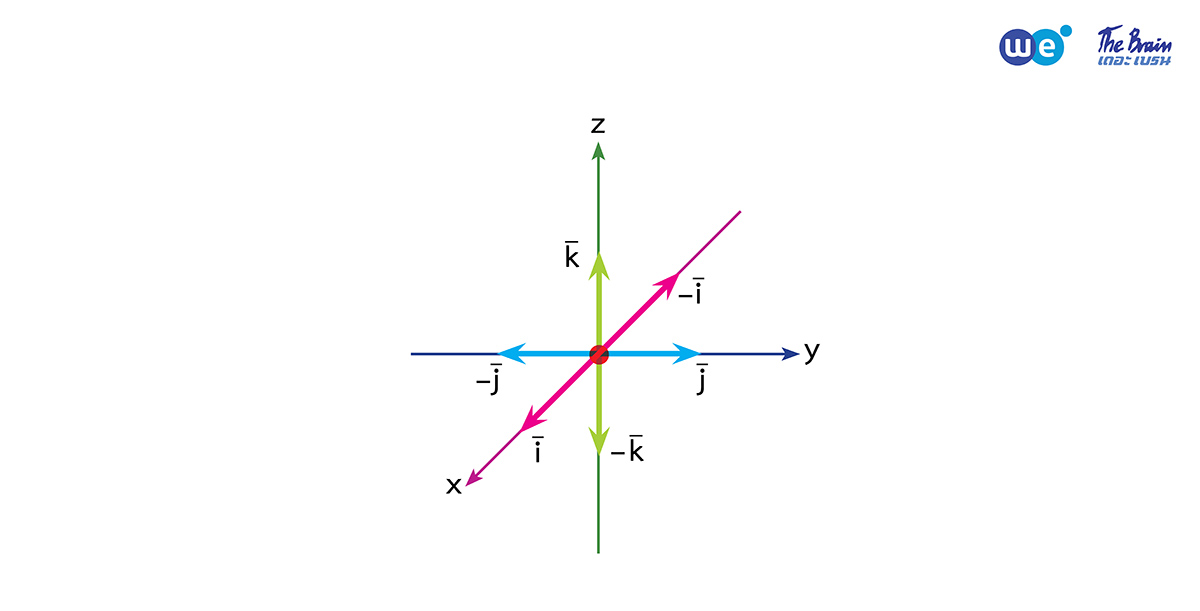
 คือ เวกเตอร์ 1 หน่วย ชี้ไปตามแกน
คือ เวกเตอร์ 1 หน่วย ชี้ไปตามแกน 
 คือ เวกเตอร์ 1 หน่วย ชี้ไปตามแกน
คือ เวกเตอร์ 1 หน่วย ชี้ไปตามแกน 
 คือ เวกเตอร์ 1 หน่วย ชี้ไปตามแกน
คือ เวกเตอร์ 1 หน่วย ชี้ไปตามแกน 
❤︎ สำหรับเวกเตอร์ใน 2 มิติ
 เมื่อ
เมื่อ  (ขนานกัน ความชันเท่า)
(ขนานกัน ความชันเท่า)
 เมื่อ
เมื่อ  (ตั้งฉากกัน ผลคูณความชันเป็น
(ตั้งฉากกัน ผลคูณความชันเป็น  )
)
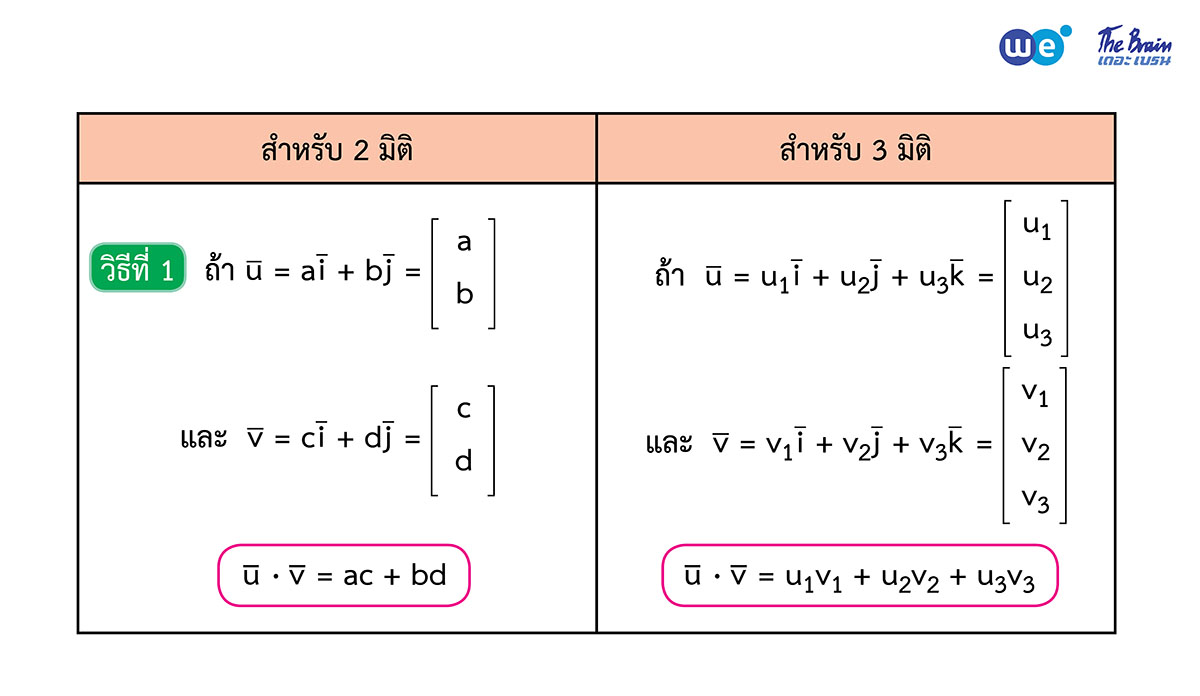
ให้  และ เป็นเวกเตอร์ใด ๆ ใน 2 มิติ หรือ 3 มิติ โดย
และ เป็นเวกเตอร์ใด ๆ ใน 2 มิติ หรือ 3 มิติ โดย  เป็นจำนวนจริง
เป็นจำนวนจริง



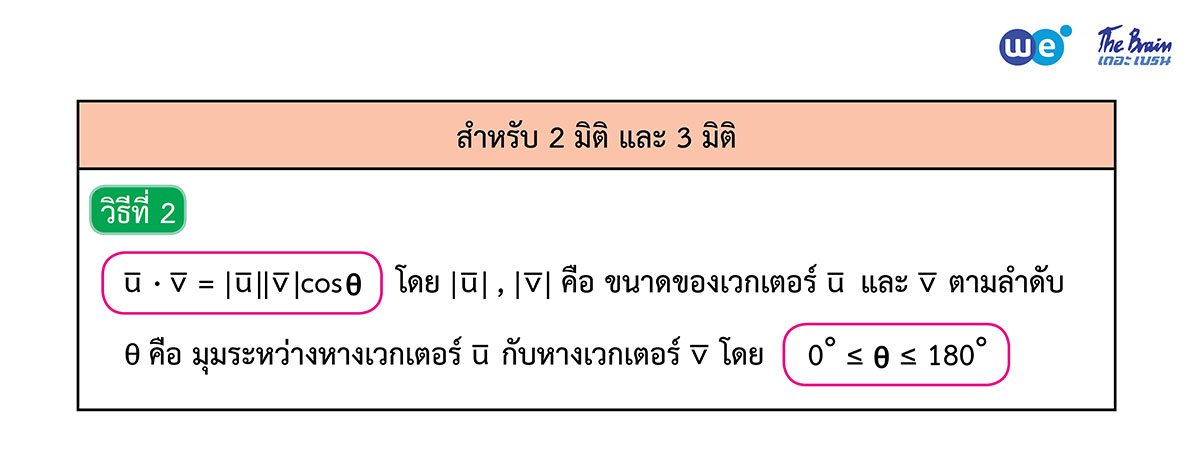
เมื่อ  คือ ผลคูณเชิงสเกลาร์ และ (ผลลัพธ์ที่ได้เป็นสเกลาร์) จะสามารถหาได้ 2 วิธี คือ
คือ ผลคูณเชิงสเกลาร์ และ (ผลลัพธ์ที่ได้เป็นสเกลาร์) จะสามารถหาได้ 2 วิธี คือ


 (
(  และ
และ  ตั้งฉากซึ่งกันและกัน)
ตั้งฉากซึ่งกันและกัน) (สมบัติการสลับที่)
(สมบัติการสลับที่)
 (สมบัติการแจกแจง)
(สมบัติการแจกแจง)
- ถ้า
 จะได้ว่า ตั้งฉากกับ
จะได้ว่า ตั้งฉากกับ  ก็ต่อเมื่อ
ก็ต่อเมื่อ 

 (
(  และ
และ  (สมบัติการสลับที่)
(สมบัติการสลับที่)
 (สมบัติการแจกแจง)
(สมบัติการแจกแจง)
 จะได้ว่า
จะได้ว่า 
❤︎ Note
ถ้า  แล้วจะได้ว่า
แล้วจะได้ว่า  และ
และ 
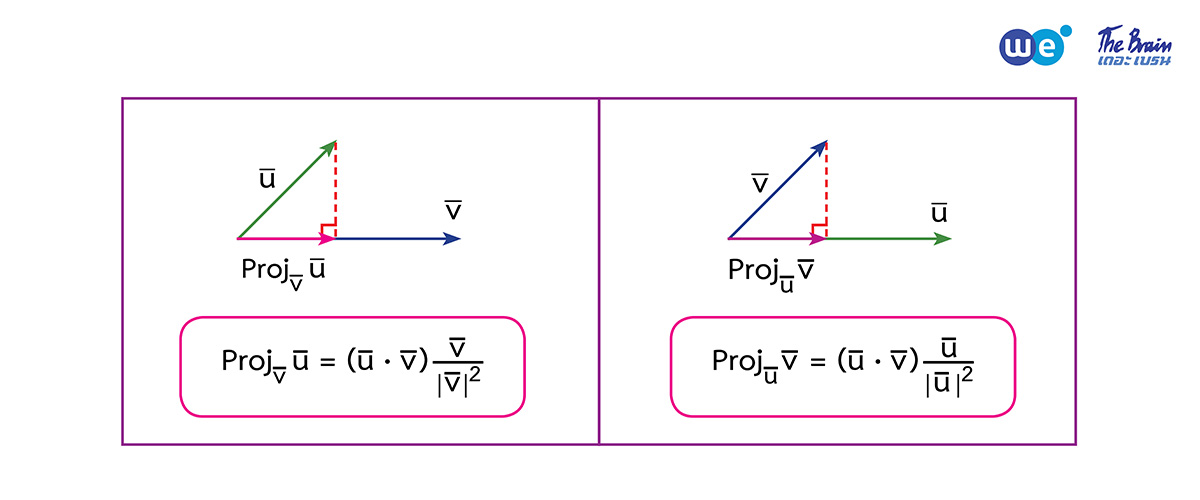
 คือ Projection ของ บน ( เป็นฉาก)
คือ Projection ของ บน ( เป็นฉาก)
 คือ Projection ของ บน ( เป็นฉาก)
คือ Projection ของ บน ( เป็นฉาก)
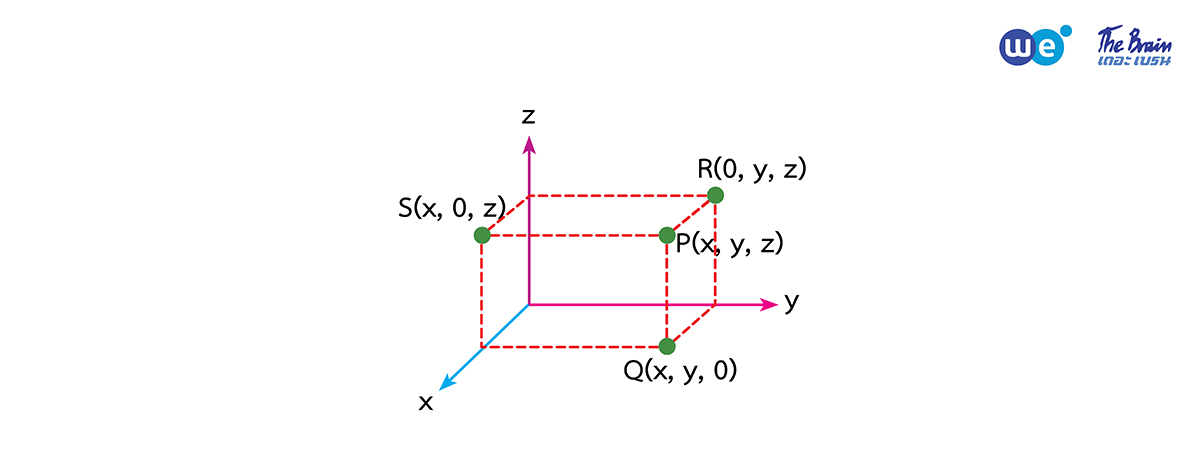
ถ้าเราลากเส้นผ่านจุด  ให้ขนานแกน
ให้ขนานแกน  ไปตัดกับระนาบ
ไปตัดกับระนาบ  จะได้จุดตัดมีพิกัดเป็น
จะได้จุดตัดมีพิกัดเป็น  เรียกจุดนี้ว่าเป็นภาพฉายของจุด
เรียกจุดนี้ว่าเป็นภาพฉายของจุด  บนระนาบ
บนระนาบ
ในทำนองเดียวกันจะเรียกจุด  ว่าเป็นภาพฉายของ บนระนาบ
ว่าเป็นภาพฉายของ บนระนาบ  และเรียกจุด
และเรียกจุด  ว่าเป็นภาพฉายของจุด บนระนาบ
ว่าเป็นภาพฉายของจุด บนระนาบ 
ถ้า  เป็นจุดกึ่งกลางระหว่างจุด
เป็นจุดกึ่งกลางระหว่างจุด  และจุด
และจุด 
จะได้ 
ถ้า  เป็นจุดตัดของเส้นมัธยฐาน
เป็นจุดตัดของเส้นมัธยฐาน  และ
และ 
และ  จะได้
จะได้ 
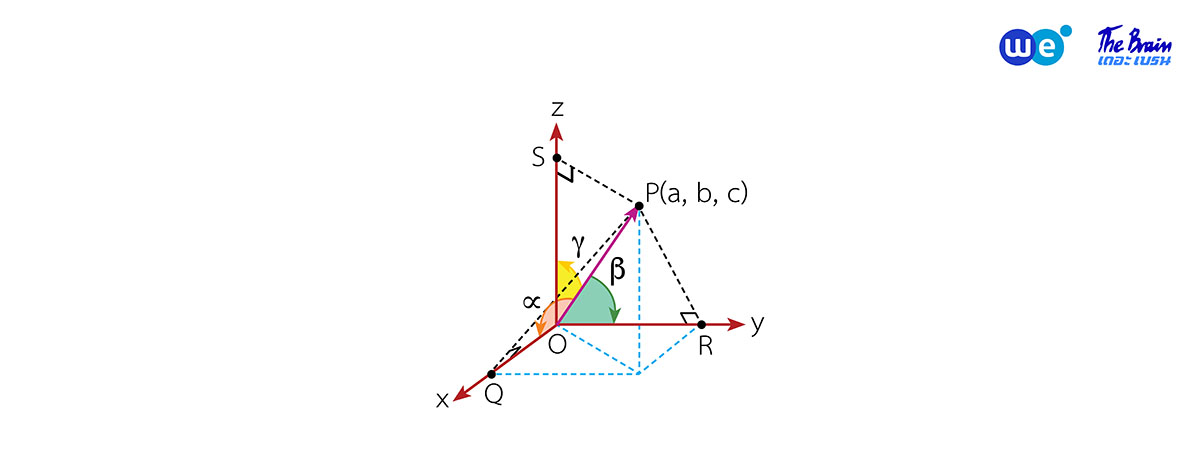
จากรูป 
โคไซน์แสดงทิศทางของเวกเตอร์  หาได้ดังนี้
หาได้ดังนี้



เมื่อ  คือ มุมระหว่าง
คือ มุมระหว่าง  กับ
กับ
 คือ มุมระหว่าง กับ
คือ มุมระหว่าง กับ
 คือ มุมระหว่าง กับ
คือ มุมระหว่าง กับ
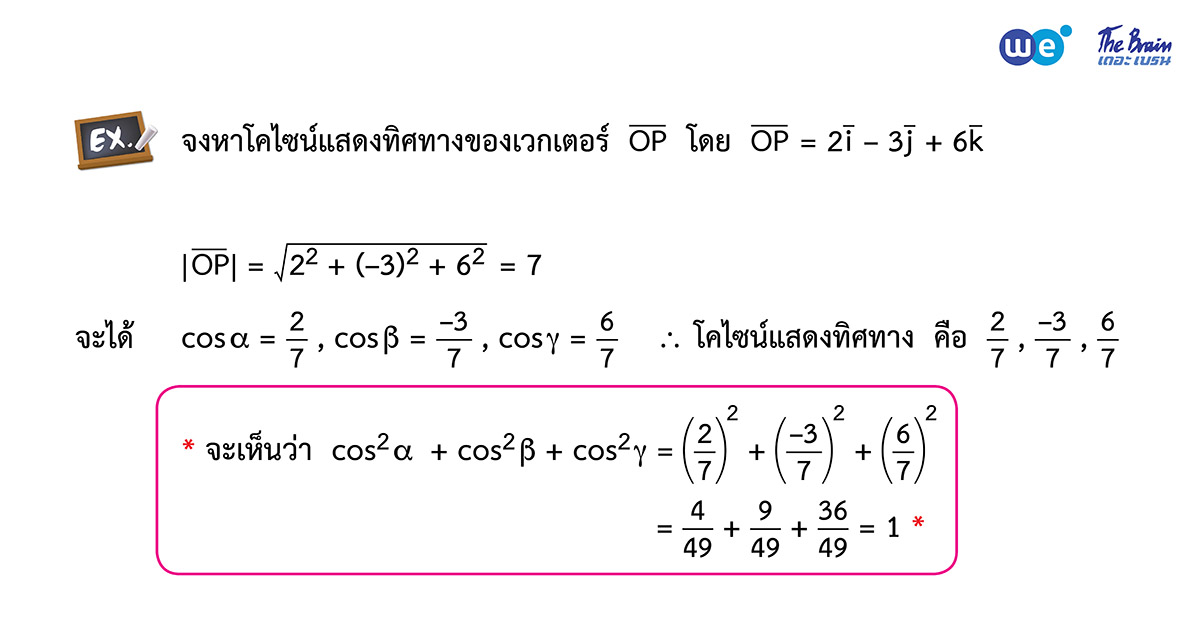
❤︎ เกร็ดความจริง! เกี่ยวกับโคไซน์แสดงทิศทาง
- ถ้า
 เป็นมุมระบุทิศทางของเวกเตอร์
เป็นมุมระบุทิศทางของเวกเตอร์
จะได้ว่า - ถ้าเวกเตอร์คู่ใดมีโคไซน์แสดงทิศทางชุดเดียวกัน แสดงว่า เวกเตอร์คู่นั้นมีทิศเดียวกัน ถ้าเวกเตอร์คู่ใดมีโคไซน์แสดงทิศทางในแต่ละแกนเป็นจำนวนที่ตรงข้ามกัน แสดงว่าเวกเตอร์คู่นั้นมีทิศทางตรงข้ามกัน
 เป็นมุมระบุทิศทางของเวกเตอร์
เป็นมุมระบุทิศทางของเวกเตอร์
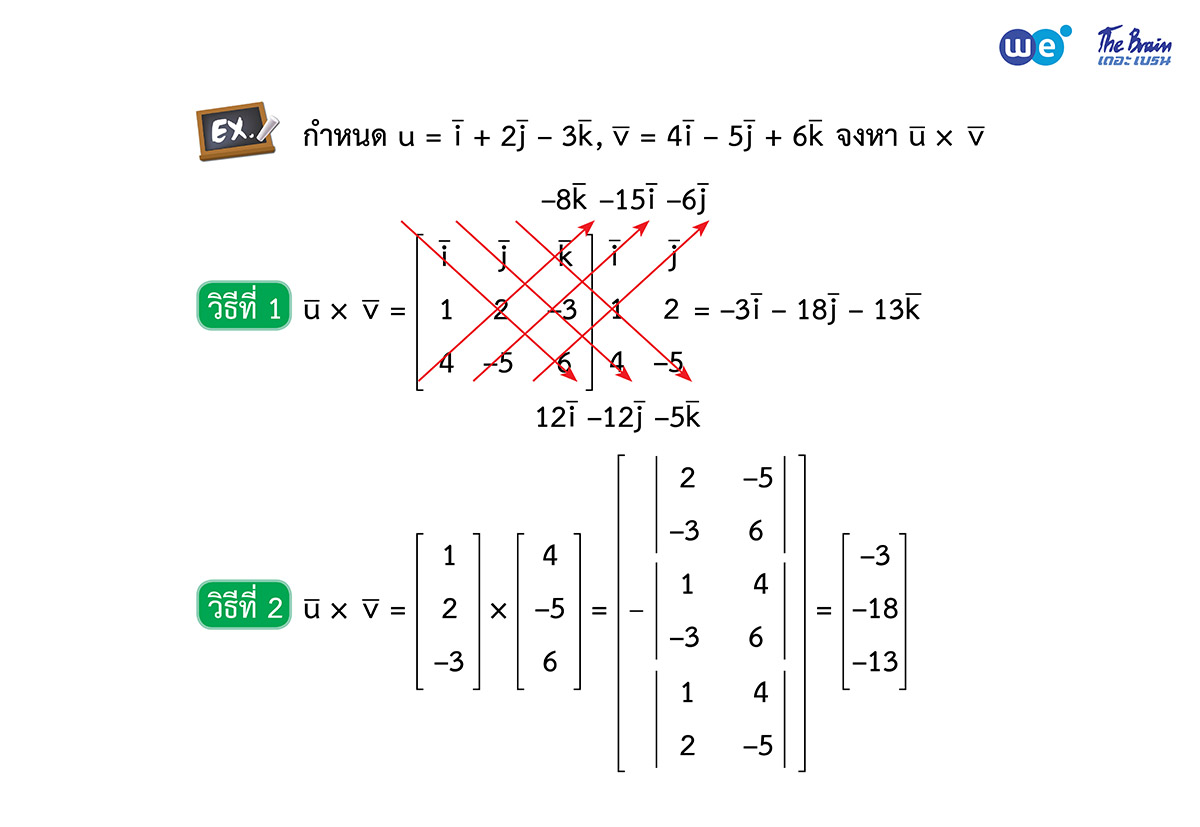
ให้  และ
และ 
 คือ การหาผลคูณเชิงเวกเตอร์ กับ (ผลลัพท์ที่ได้เป็นเวกเตอร์)
คือ การหาผลคูณเชิงเวกเตอร์ กับ (ผลลัพท์ที่ได้เป็นเวกเตอร์)
![\overline{u} \times \overline{v} \: = \: \begin{bmatrix} \overline{i} & \overline{j} & \overline{k} \\[4pt] u_1 & u_2 & u_3 \\[4pt] v_1 & v_2 & v_3 \end{bmatrix} \: = \: \begin{bmatrix} u_2 & u_3 \\[2pt] v_2 & v_3 \end{bmatrix} \overline{i} - \begin{bmatrix} u_1 & u_3 \\[2pt] v_1 & v_3 \end{bmatrix} \overline{j} + \begin{bmatrix} u_1 & u_2 \\[2pt] v_1 & v_2 \end{bmatrix} \overline{k}](https://www.webythebrain.com/wp-content/ql-cache/quicklatex.com-a905bee96ef9c1f2528a5dd1a444f00c_l3.png "Rendered by QuickLaTeX.com")
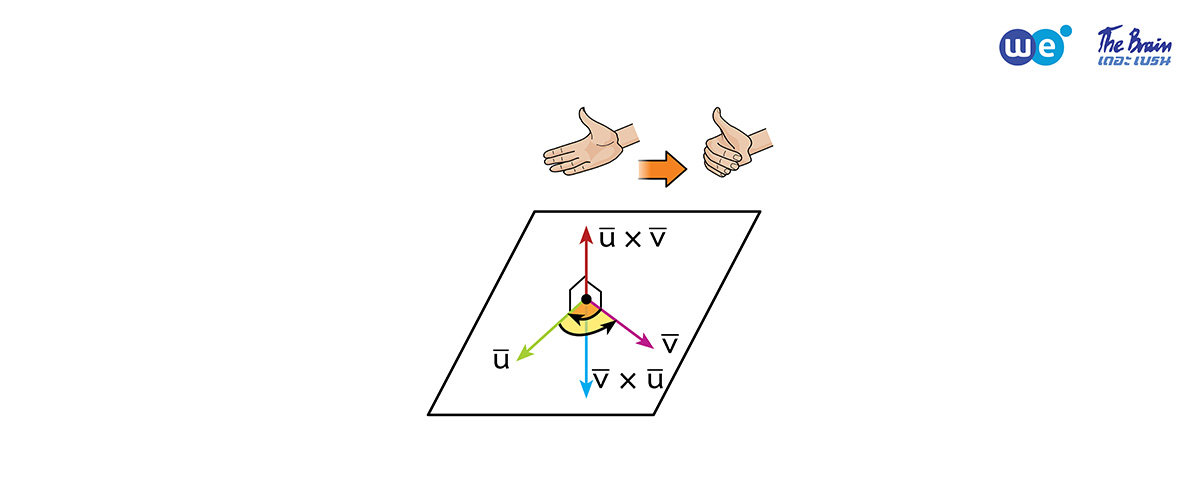
น้อง ๆ สามารถหาทิศทางของ  และ
และ  ได้โดยใช้กฎมือขวา
ได้โดยใช้กฎมือขวา
- ถ้าตอนแรกพุ่งนิ้วทั้งสี่ตามทิศของ แล้วพับนิ้วทั้งสี่เข้าหาทิศของ นิ้วหัวแม่มือจะชี้ทิศของ

- ถ้าตอนแรกพุ่งนิ้วทั้งสี่ตามทิศของ แล้วพับนิ้วทั้งสี่เข้าหาทิศของ นิ้วหัวแม่มือจะชี้ทิศของ
❤︎ จากการสังเกต
จะเห็นว่า และ เป็นเวกเตอร์ที่ไม่ขนานกัน
จะได้ว่า  และ
และ  เป็นเวกเตอร์ที่ตั้งฉากกับระนาบที่ผ่าน และ
เป็นเวกเตอร์ที่ตั้งฉากกับระนาบที่ผ่าน และ
(พูดง่าย ๆ ตั้งฉากกับ  และ ตั้งฉากกับ )
และ ตั้งฉากกับ )
และจะเห็นว่า และ มีทิศทางตรงข้ามกัน
ดังนั้น 
❤︎ เกร็ดความจริง
ถ้า  และ เป็นเวกเตอร์ที่อยู่บนระนาบเดียวกัน แล้ว
และ เป็นเวกเตอร์ที่อยู่บนระนาบเดียวกัน แล้ว 
ให้ และ เป็นเวกเตอร์ในระบบพิกัดฉากสามมิติ โดย  และ
และ 
จะได้ว่า  เมื่อ
เมื่อ  เป็นขนาดของมุมระหว่าง และ
เป็นขนาดของมุมระหว่าง และ
โดยที่ 0° ≤ θ ≤ 180°
ให้ และ เป็นเวกเตอร์ใด ๆ ในสามมิติ และ  เป็นจำนวนจริงใด ๆ
เป็นจำนวนจริงใด ๆ














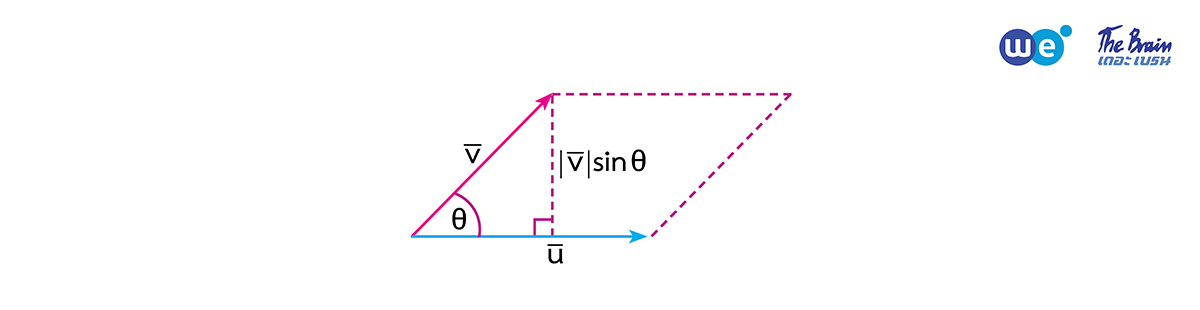
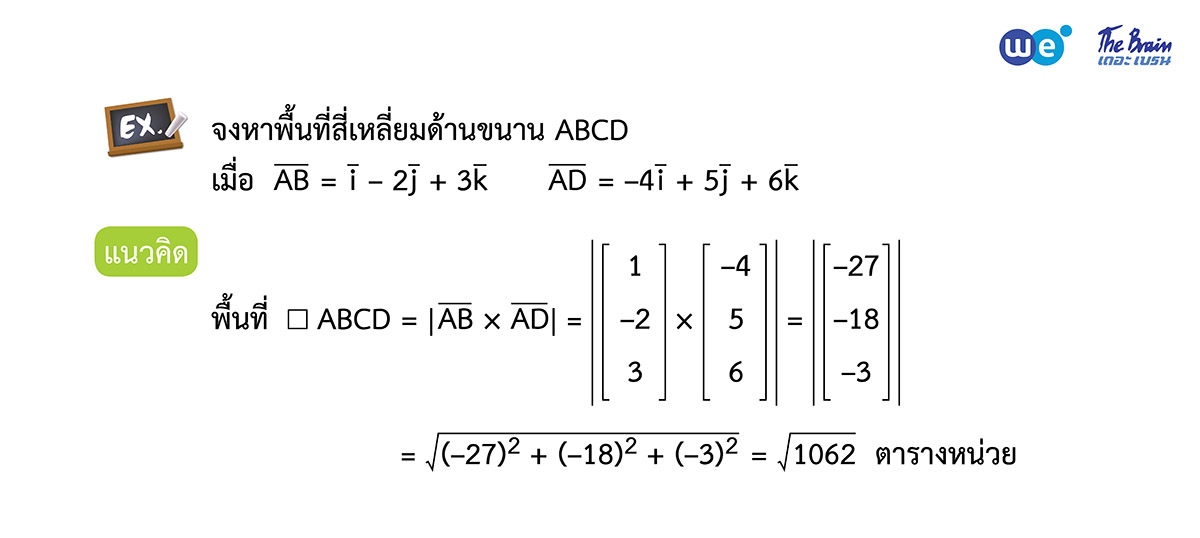
พื้นที่ ◻ ด้านขนาน = ฐาน × สูง
= 
พื้นที่ ◻ ด้านขนาน = 
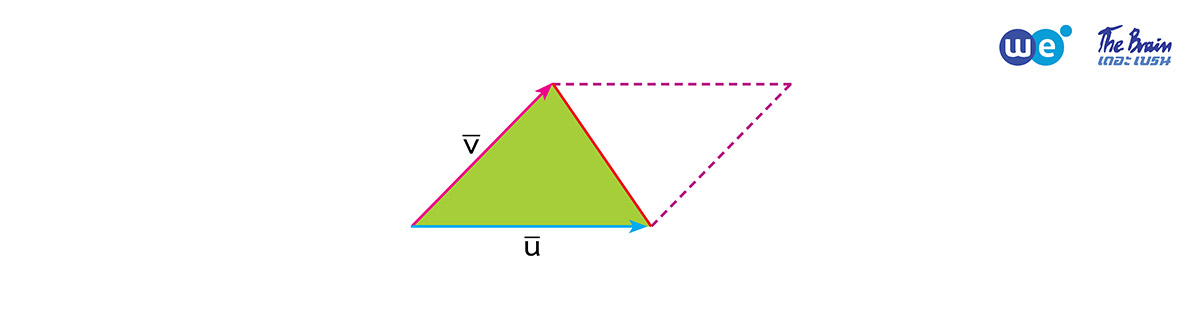
❤︎ ข้อสังเกต
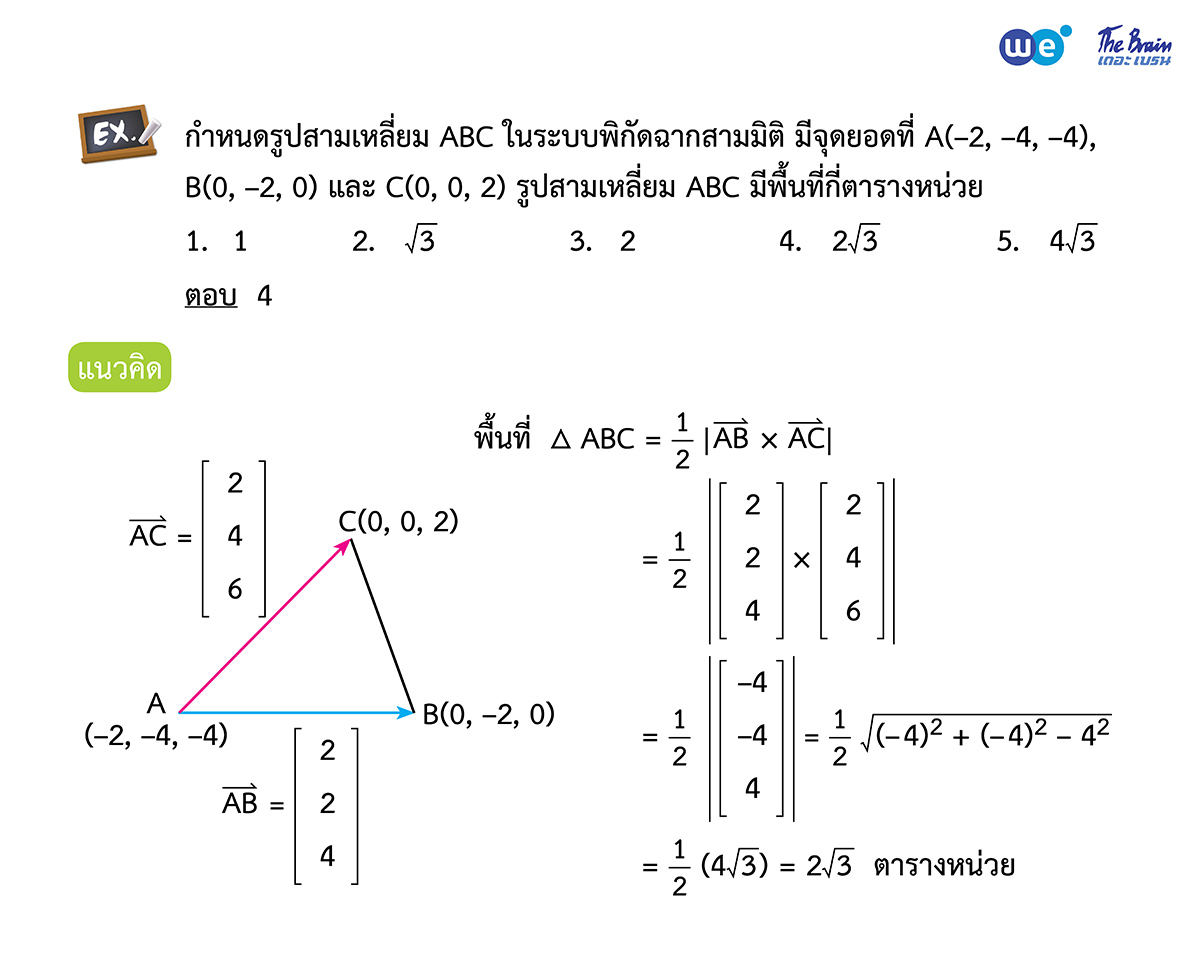
พื้นที่ ∆ ที่แรเงา =  พื้นที่ ◻ ด้านขนาน
พื้นที่ ◻ ด้านขนาน
พื้นที่ ∆ ที่แรเงา = 
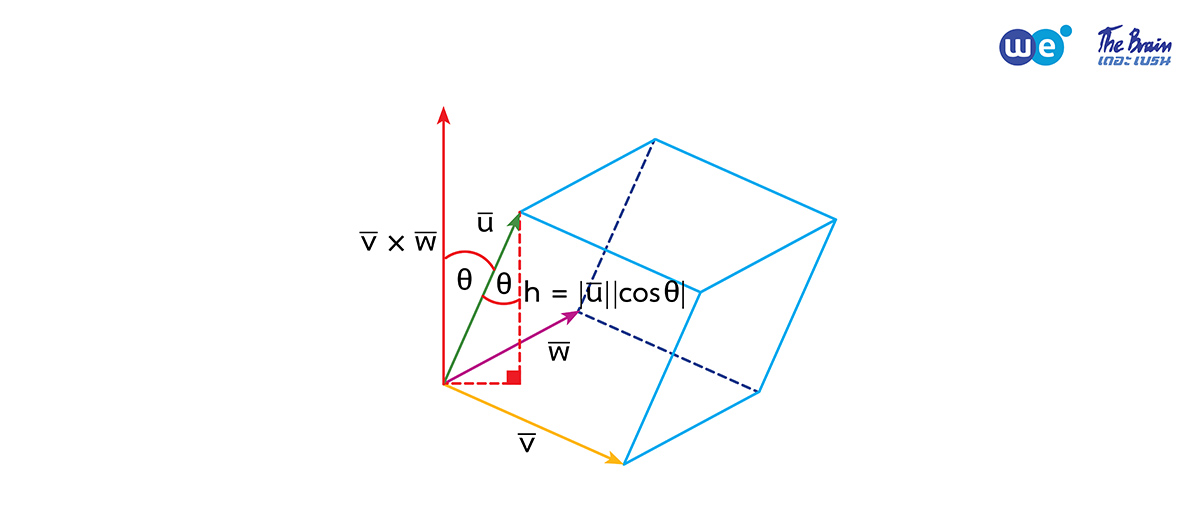
ปริมาตร = พื้นที่ฐาน  สูง
สูง
= 
= 
= 
ปริมาตร = 
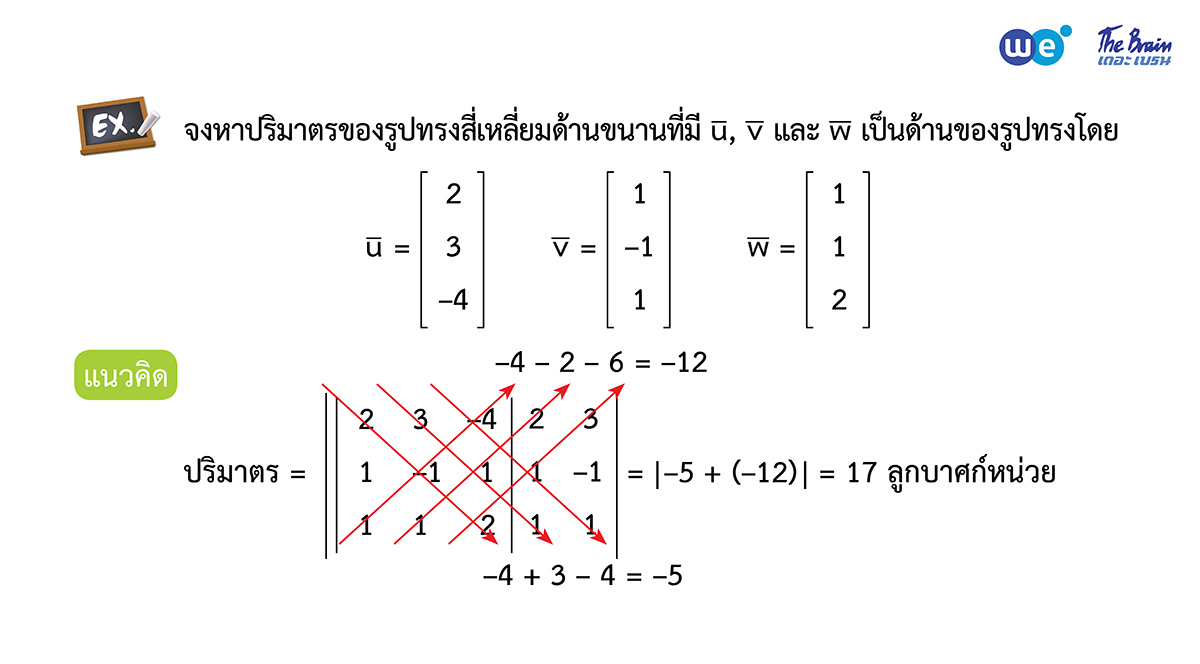
กำหนดทรงสี่เหลี่ยมด้านขนานมี และ เป็นด้าน
ถ้ากำหนด  และ
และ  จะได้ว่า
จะได้ว่า
ปริมาตรของรูปทรงสี่เหลี่ยมด้านขนาน 
ถ้า  และ อยู่บนระนาบเดียวกัน
และ อยู่บนระนาบเดียวกัน
สามารถอ้างได้ว่า ปริมาตร